目录
前言
这是机械原理课程得课程设计,在完成后我将其上传到我的博客算是我的学习成果!
一、题目设计及其要求
1.1 题目设计———《游梁式抽油机连杆机构的分析与综合》
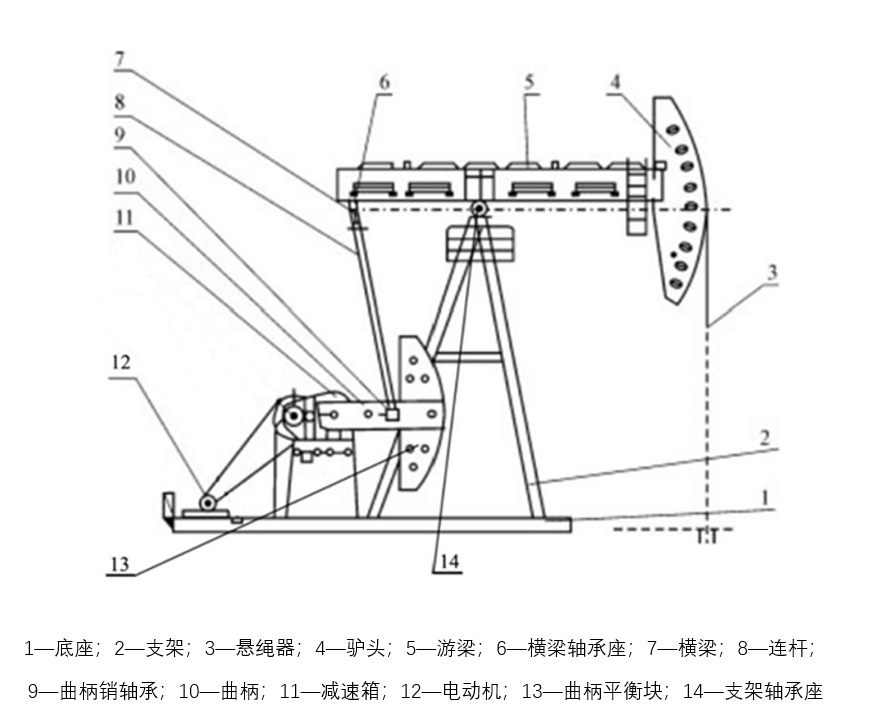
游梁式抽油机结构如图 1 所示,它是有杆抽油系统的地面驱动装置,由电动机、减速器、机架和连杆机构等部分组成。其工作原理如图 2 所示:由电动机供给动力,经减速器将动力机的高速转动变为抽油机曲柄的低速转动,曲柄轴的低速旋转运动由连杆机构变为驴头悬绳器的上下往复直线运动,经悬绳器总成带动抽油泵工作,悬绳器下接抽油杆柱,抽油杆柱带动抽油泵柱塞(或活塞)在泵筒内作上下往复直线运动,从而将油井内的原油举升到地面,达到抽油的目的。悬点向上运动为抽油机工作行程,此过程中抽油杆带动井下柱塞泵工作,向上举升井液。悬点向下运动为回程,此过程不举升井液。悬点上下往复运动过程中所受的载荷为悬点载荷 $W$。
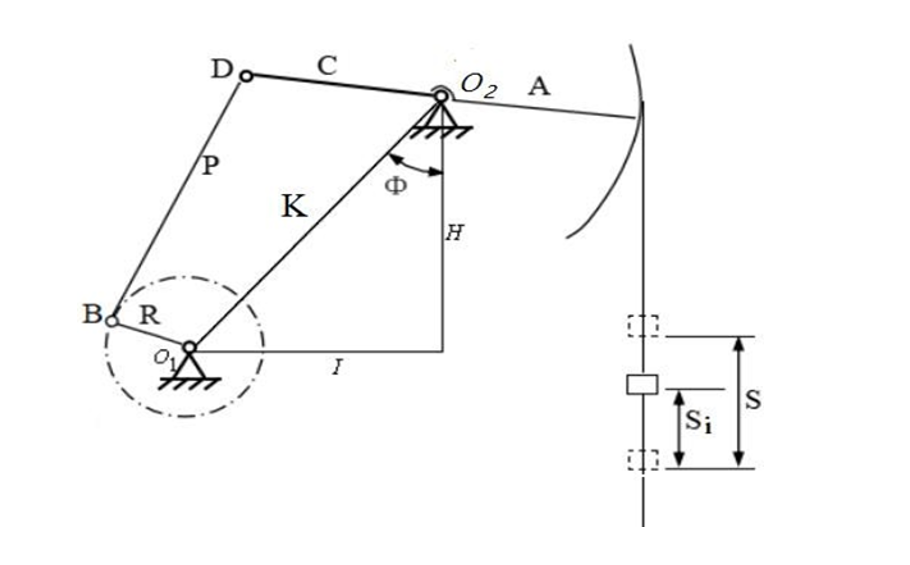
下图所示为游梁式抽油机连杆机构示意图,由图可知,该抽油机主体机构由一个曲柄摇杆机构 O1BDO2和一绳轮机构串联而成。图中$R、P、C、K$ 分别为曲柄、连杆、游梁后臂(即摇杆)和机架的长度。游梁前臂长(即驴头弧线半径)为 A(即O2 点到井口的距离),两固定铰链点的高差(垂直极距)为 $H$、水平极距为 $I$,悬点冲程为$S$,机构的极位夹角为 $\theta$。
1.1.1 抽油机的总体方案的设计
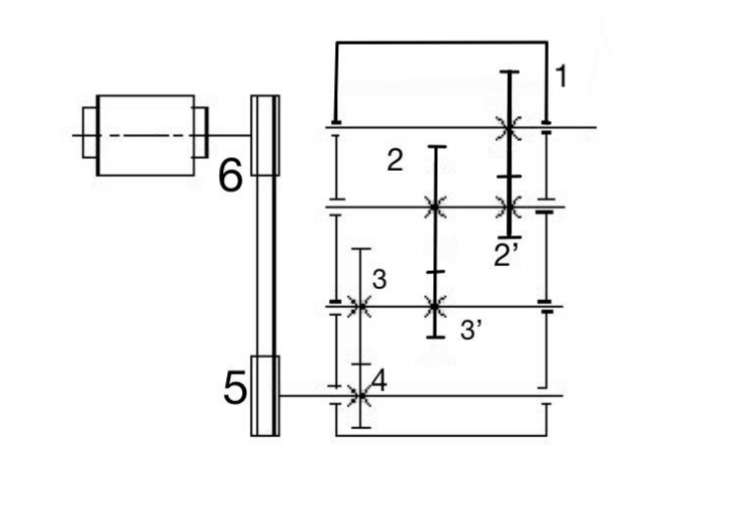
构思一个合理的传动系统。它可将电机的高速转动(用电机转速 Nd 表示)变换为抽油杆的低速往复移动(用冲次 N 表示),所需数据详见表1,要求传动比误差不超过 5%。在构思机构传动方案时,能较为合理地分配各部分的传动比,最后在计算机上绘出机构传动示意图。
1.1.2 抽油机连杆机构的尺度综合
根据给定的参数(详见表1),用解析法确定机构各杆的长度,并判断曲柄的合理转向。
1.1.3 抽油机连杆机构的运动分析
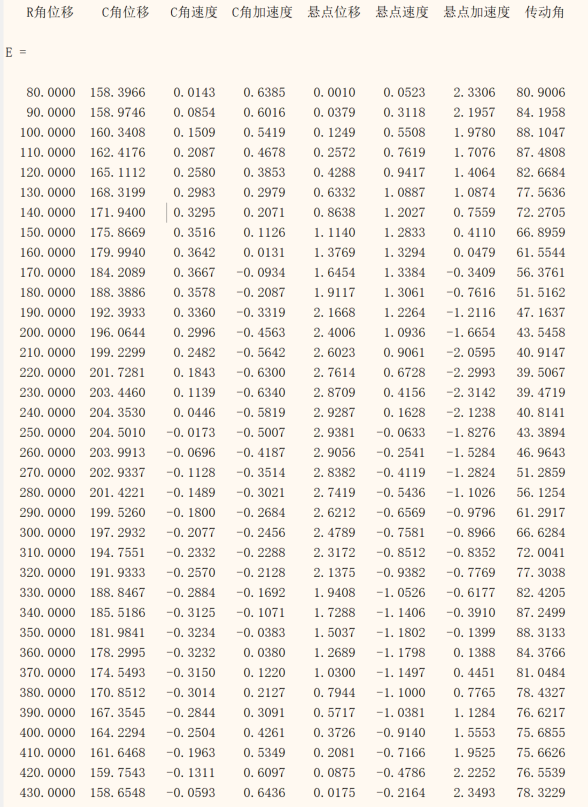
根据已求出的机构尺度参数及电动机转速,用解析法求出当曲柄转角 $\theta_1$从悬点位于最点起,沿转动方向每隔$\ 10^\circ$计算一组运动参数,其中包括:机构的传动角 $\gamma$ ,各杆的角位置、角速度、角加速度及悬点的位移 $Si$(以悬点处于最低位置时,曲柄转角为初始位置)、速度 $Vi$ 和加速度 $ai$,应用计算机绘出传动角曲线,分析机构最小传动角出现的位置;分别绘出悬点位移 $Si$ 曲线、速度$Vi$ 曲线和加速度$ai$曲线,并将位移曲线、速度曲线和加速度曲线绘制在同一幅图中,分析计算结果的合理性。
1.1.4 抽油机工作机构动力分析
游梁式抽油机按照平衡重位置的布置方式的不同可分为游梁平衡、曲柄平衡和复合平衡。本次课设我们只考虑曲柄平衡:
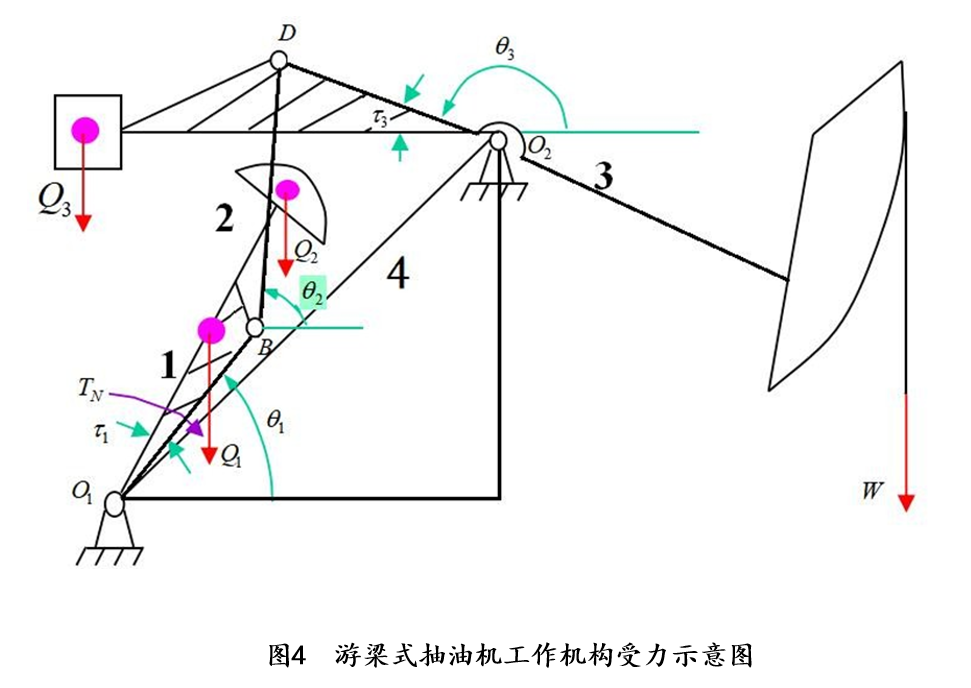
图 4 为游梁式抽油机工作机构受力示意图,给定如下参数: 悬点载荷W,曲柄重量$Q_1$、曲柄平衡重重量$Q_2$、游梁平衡重重量$Q_3$、旋转半径$R_1$、$R_2$和$R_3$,偏角$\tau_1$和$\tau_3$。
本次机械原理课程设计以曲柄平衡游梁式抽油机为研究对象,游梁平衡重重量$Q_3$及其重心旋转半径$R_3$和偏角$\tau_3$均取值为零。
请分别对曲柄平衡游梁式抽油机的游梁、连杆和曲柄进行受力分析,用解析法求出机构处于不同位置时各运动副的约束反力,以及在曲柄轴上施加的实际扭矩$TN$,用计算机绘出$TN$的变化曲线,并对计算结果进行分析,确定最大扭矩情况。
1.2 规格要求
| $电机转速N_d (转/分)$ | $冲次N(冲/分)$ | $S(m)$ | $A(m)$ | $I(m)$ | $H(m)$ | $R(m)$ |
|---|---|---|---|---|---|---|
| $900$ | $11$ | $2.94$ | $3.65$ | $3.44$ | $3.47$ | $\le1$ |
| $\theta(^\circ)$ | $\gamma(^\circ)$ | $r_1(m)$ | $Q_1(m)$ | $r_2(m)$ | $Q_2(m)$ | $\tau(^\circ)$ |
| $11$ | $\ge 36$ | $0.6$ | $35000$ | $1.29$ | $61300$ | $7$ |
| 曲柄相对于初始位置转过的角度$(^\circ)$ | 悬点载荷$W(N)$ | 曲柄相对于初始位置转过的角度$(^\circ)$ | 悬点载荷$W(N)$ |
|---|---|---|---|
| 0 | 58736 | 190 | 68580 |
| 10 | 60789 | 200 | 68580 |
| 20 | 66140 | 210 | 68580 |
| 30 | 74049 | 220 | 68580 |
| 40 | 83539 | 230 | 68580 |
| 50 | 93734 | 240 | 68580 |
| 60 | 96316 | 250 | 68580 |
| 70 | 92041 | 2260 | 68580 |
| 80 | 88720 | 270 | 68580 |
| 90 | 86353 | 280 | 68580 |
| 100 | 84779 | 290 | 68580 |
| 110 | 83764 | 300 | 68580 |
| 120 | 83064 | 310 | 68580 |
| 130 | 82443 | 320 | 68580 |
| 140 | 81679 | 330 | 68580 |
| 150 | 80545 | 340 | 68580 |
| 160 | 78801 | 350 | 68580 |
| 170 | 72217 | 360 | 68580 |
| 180 | 72700 |
回到顶端
二、总体传动方案的设计
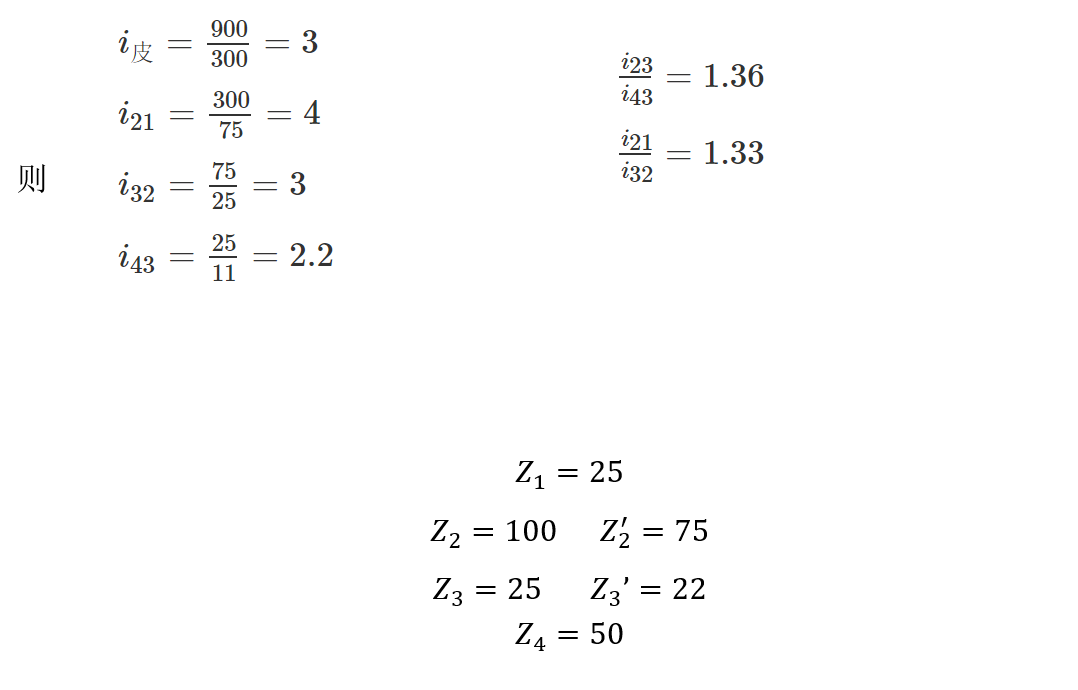
2.1 传动比
由题可知,电机转速为$N_d=980$转/分,需将其转化为推油杆的低俗往复运动,冲次为$11$转/分。
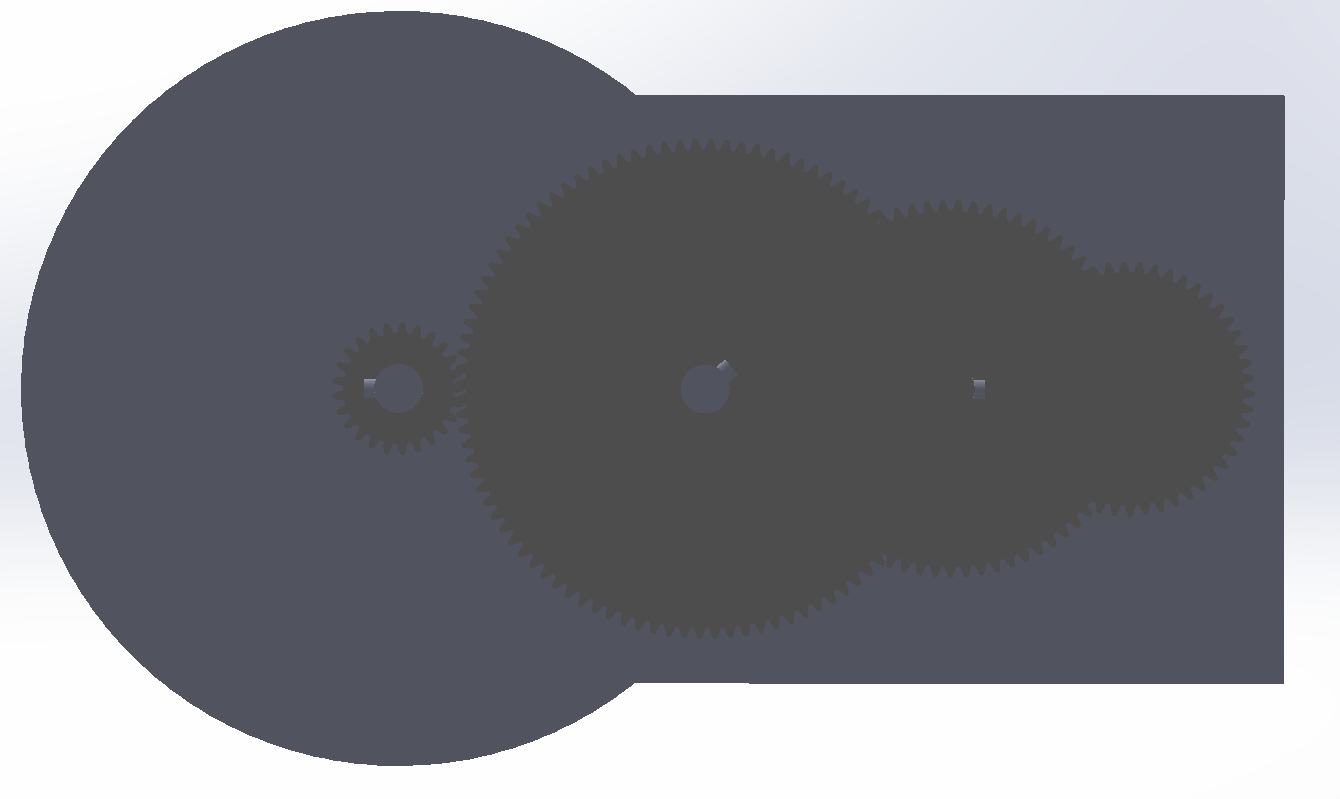
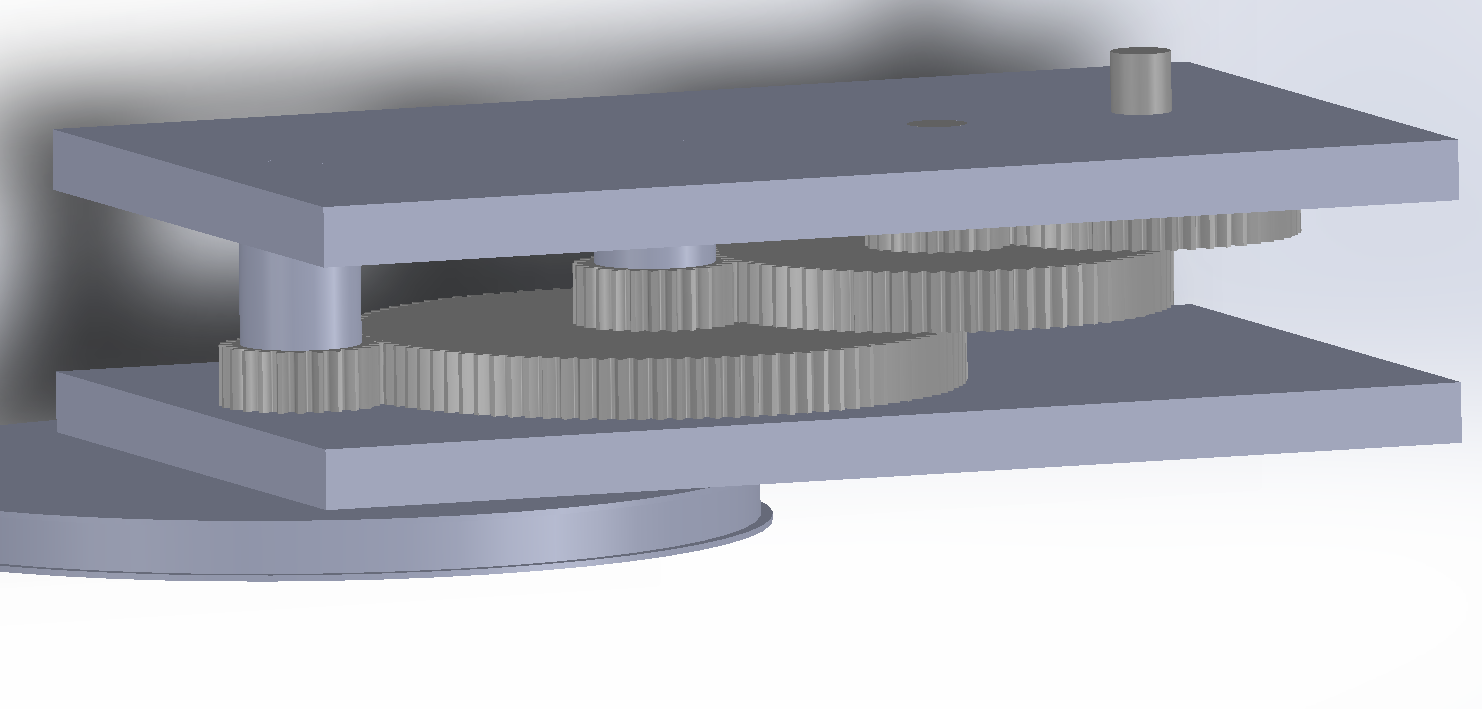
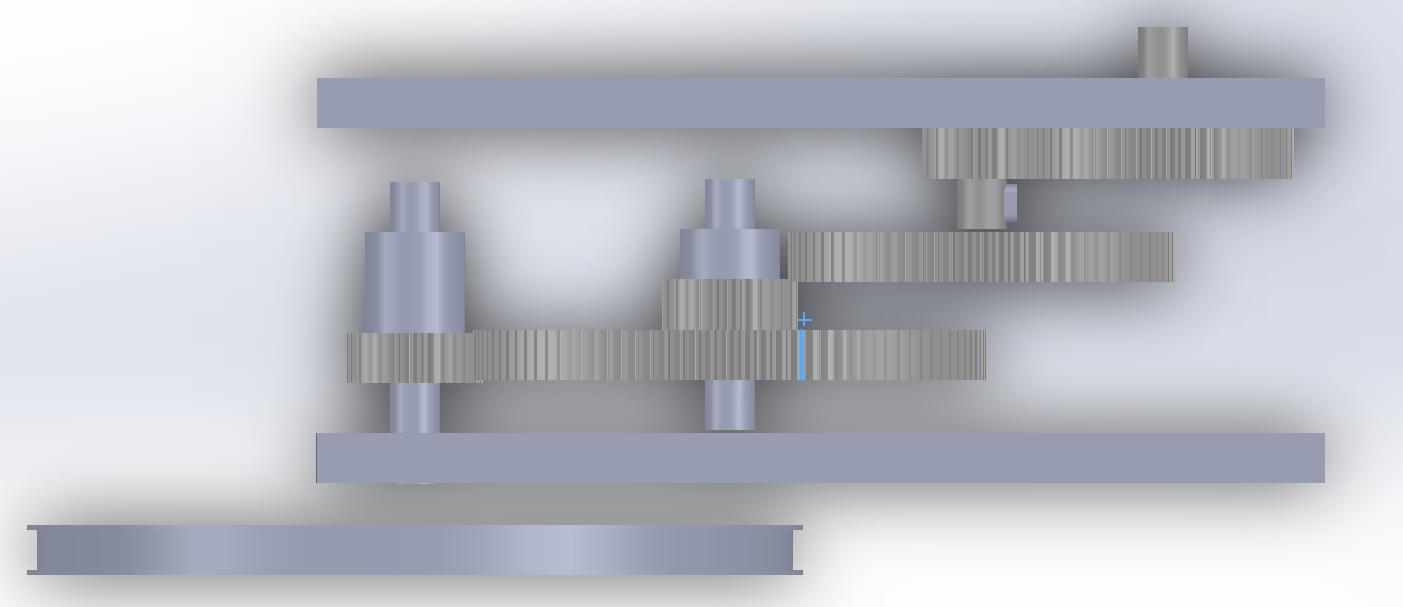
2.2 设计图
回到顶端
三、连杆机构的尺度综合
3.1 建立模型
由已知条件可以得出:
$\psi=\frac{S}{A}·\frac{180}{\pi}=38.85^\circ$
在$\Delta{D_2D_1O_2}$中:
在$\Delta{D_2D_1O_1}$中:
由上述两个式子化简得到:
进一步化简得到:
$P=\begin{Bmatrix} \frac{K^2-R^2\begin{bmatrix}\frac{1+cos\theta}{2sin^2\frac{\psi}{2}}-\frac{sin\theta}{tan\frac{\psi}{2}}-cos\theta\end{bmatrix}}{\frac{1-cos\theta}{2sin^2\frac{\psi}{2}}+\frac{sin\theta}{tan\frac{\psi}{2}}+cos\theta}\end{Bmatrix}^\frac{1}{2}$
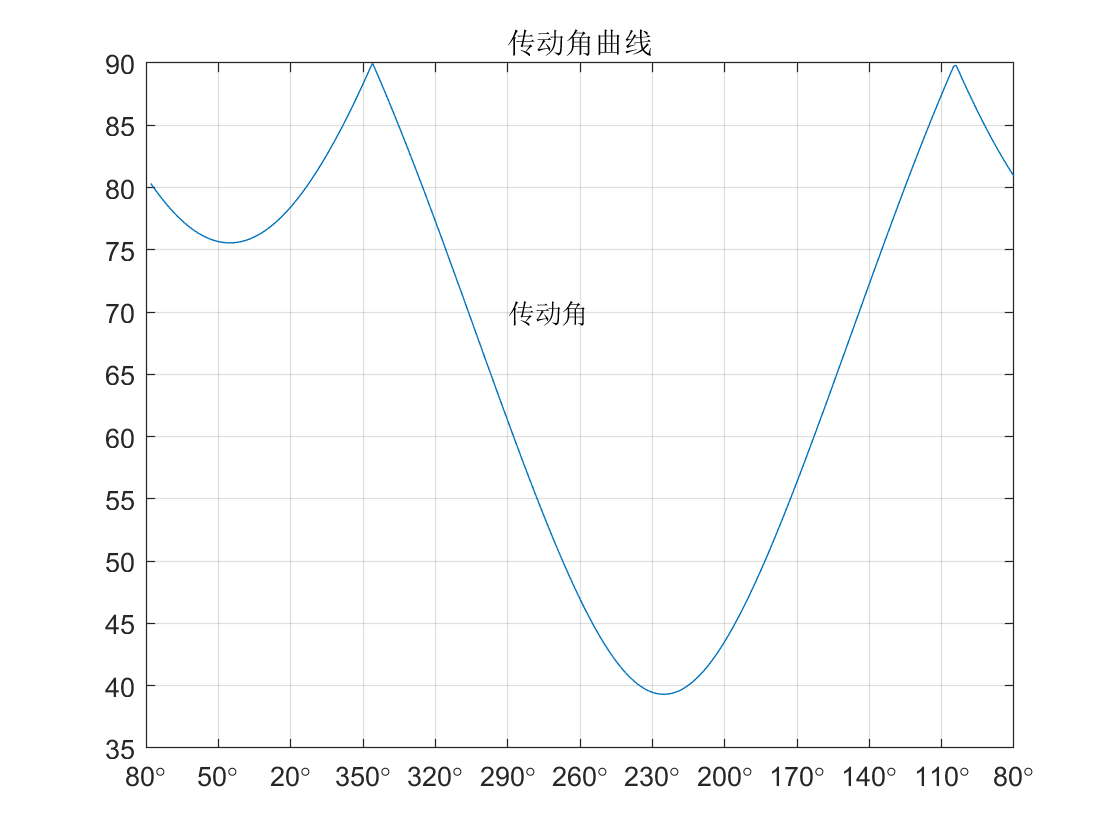
根据机构极限位置可以求出2个传动角公式:
$\gamma_2=arccos(\frac{C^2+P^2-(K+R)^2}{2CP})$
$\gamma_m=min(\gamma_1,\gamma_2)$
3.2 迭代求值
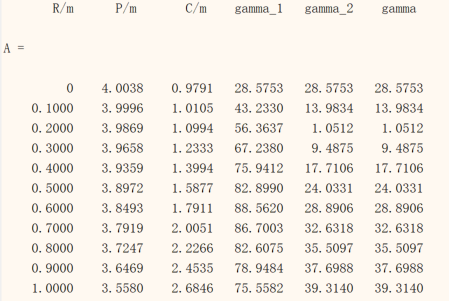
详细解析:
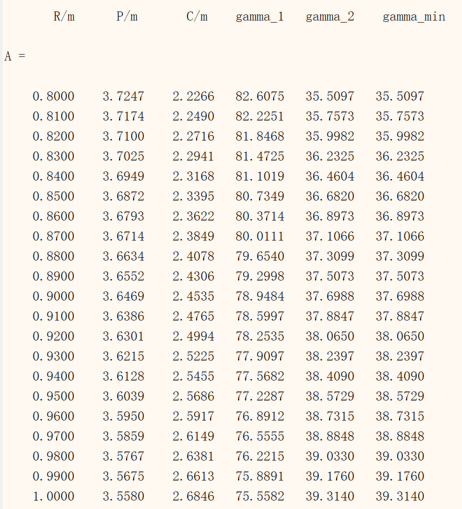
由此可得出最优解:
$R=1m,P=3.558m,C=2.6846m时,传动角最大为{39.314}^\circ$
当$Si$取最大值和最小值时,曲柄得角度分别为:
$\phi_2=247^\circ$
故,该机构要实现速降缓升需要将曲柄顺时针转动。
回到顶端
四、连杆机构运动分析
4.1 建立模型
首先求出$\theta_1$的初始位置,当摇杆运动到最低点时,曲柄,连杆在同一条直线上,在$\Delta O_1O_2D_2$与由$K、I、H$所组成的直角三角形中,可算出曲柄相对于水平线的角度,列出公式:
可得 $\theta_1$的初始角为${78}^\circ$,在下图中,对其进行位置分析:
$Pcos\theta_2=I+Ccos\theta_3-Rcos\theta_1=N$
联立可得:
$\omega_3=\frac{\omega_1Rsin(\theta_2-\theta_1)}{Csin(\theta_2-\theta_3)}$
求导;
$\alpha_2=\frac{\omega_1Rcos(\theta_2-\theta_1)(\omega_1-\omega_3)sin(\theta_3-\theta_2)-sin(\theta_1-\theta_3)(\omega_3-\omega_2)cos(\theta_3-\theta_2)}{Psin(\theta_3-\theta_2)^2}$
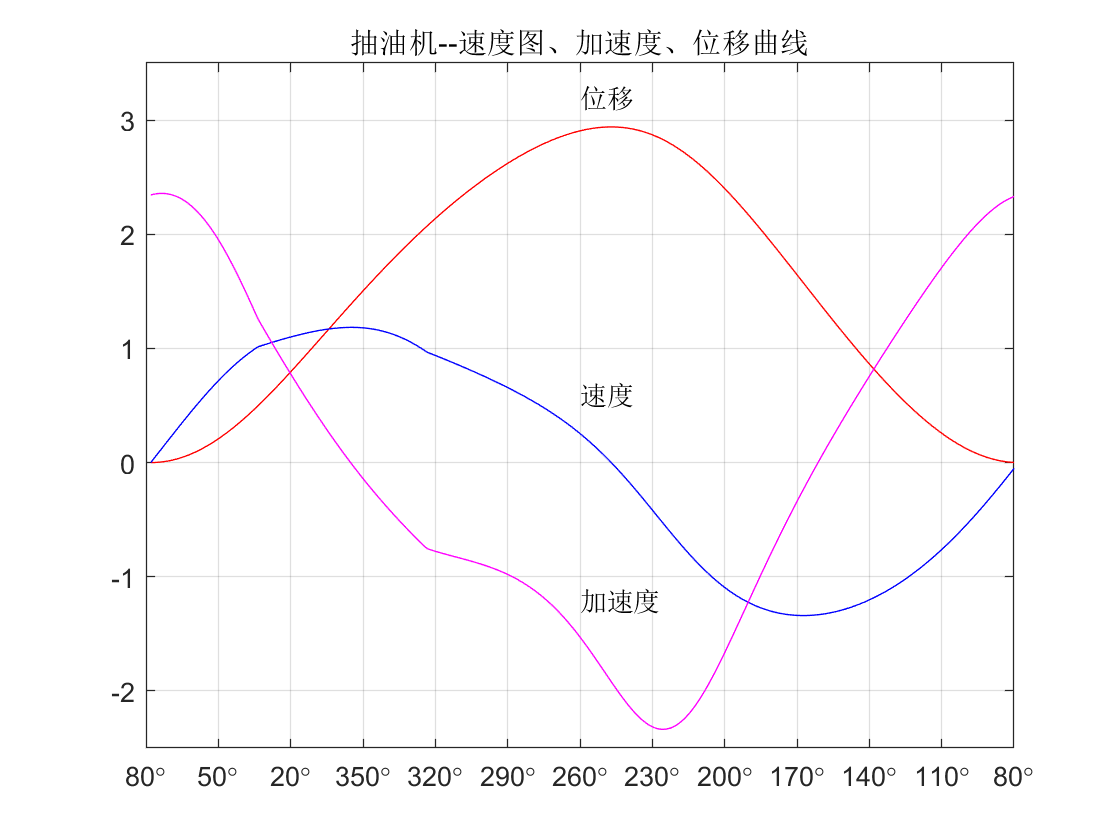
4.2 确定公式
悬点位移:
悬点速度:
悬点加速度:
4.3 编程绘图
回到顶端
五、连杆机构动力分析
5.1 建立模型
在图中,分别对曲柄、连杆、油梁受力分析可以得到9个方程:
$\begin{cases} R{21x}+R{41x}=0 \\R{21y}+R{41y}=0 \\ TN+Q_1r_1cos(\tau_1+\theta_1)+Q_2r_2cos(\tau_1+\theta_1)+R{21x}Rsin\theta1=R{21y}Rcos\theta_1 \end{cases}$
$\begin{cases} R{21x}=R{32x}\\R{21y}=R{32y}\\ R{32y}Pcos\theta_2=R{32x}Psin\theta_2 \end{cases}$
$\begin{cases} R{43x}=R{32x}\\R{43y}=R{32y}+W+Q3\\ AW=R{32y}Ccos\tau3+R{32x}Ctan\theta_3+Q_3r_3\end{cases}$
$T_W=\frac{AW(tan\theta_2cos\theta_1-sin\theta_1)}{C(sin\theta_3-tan\theta_2cos\theta_3)}$
$T_Q=cos(\tau_1+\theta_1)(Q_1r_1+Q_2r_2)$
$TN=T_W-T_Q$
5.2 程序绘图
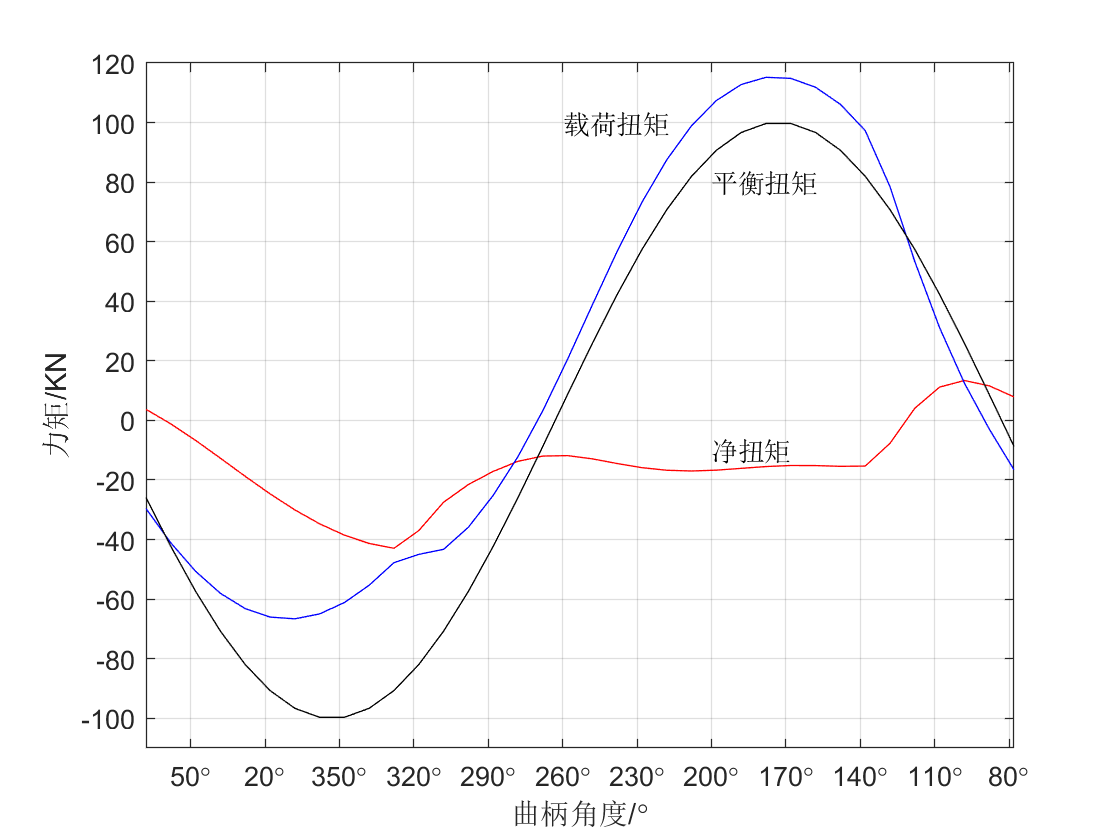
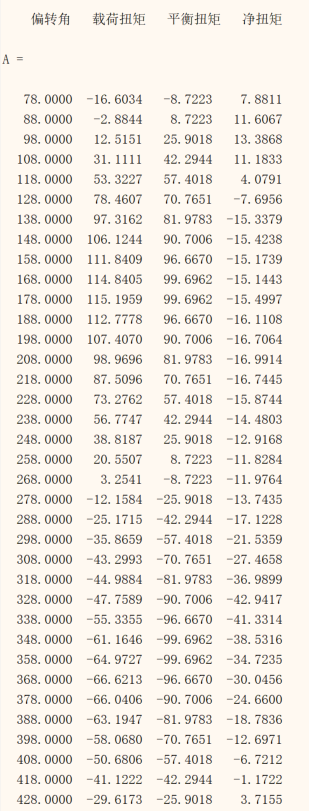
从上述表可以看出,净扭矩在${328}^\circ$左右时最大,最大约为$42.9417kN$,冲表格可得出净扭矩图线的曲线是等于载荷扭矩减去平衡扭矩曲线,说明三条曲线是符合$T_N=T_w-T_Q$,所以,此图合理。
回到顶端
六、附录
6.1 游梁式抽油机连杆机构尺度综合优选方法程序
1 | clear |
6.2 游梁式抽油机连杆机构运动分析优选方法程序
1 | clear |
6.3 游梁式抽油机连杆机构动力分析优选方法程序
1 | clc |