题目
某直动尖顶推杆盘型凸轮机构,已知:
基圆半径: $r_0 =50mm$
偏心距: $e= 15mm$
推程运动角: $\delta_0 =150^\circ$
远休止角: $\delta_1 =30^ \circ$
回程运动角: $\delta_2 =90 ^\circ$
近休止角: $\delta_3 = 90 ^\circ$
推程阶段运动规律为等加速等减速。回程阶段为简谐运动,凸轮转向为顺时针,偏置方式为正偏置。
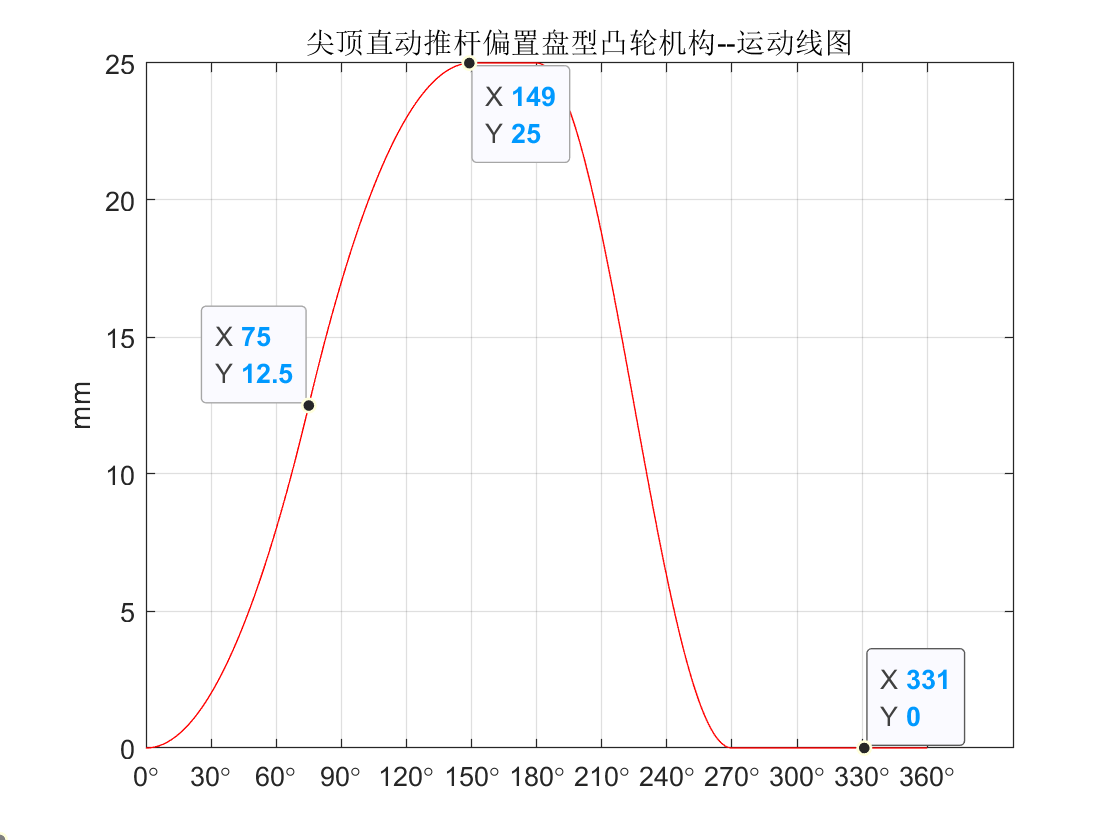
用解析法设置此凸轮机构,推导凸轮轮廓线数学方程,并绘制运动线图和凸轮轮廓图。
建立数学模型
等加速等减速运动过程
| 待求量 | 推程 | 回程 |
|---|---|---|
| 加速阶段 | $0\le\delta\le \frac{\delta_0}{2}$ | $0\le\delta\le \frac{\delta_0’}{2}$ |
| $s=$ | $2h\frac{\delta^2}{\delta_0^2}$ | $h-2h\frac{\delta^2}{\delta_0’^2}$ |
| $v=$ | $4h\omega\frac{\delta}{\delta_0^2}$ | $-4h\omega\frac{\delta}{\delta_0’^2}$ |
| $\alpha=$ | $4h\frac{\omega^2}{\delta_0^2}$ | $-4h\frac{\omega^2}{\delta_0’^2}$ |
| 减速阶段 | $\frac{\delta_0}{2}\le\delta\le\delta_0$ | $\frac{\delta_0’}{2}\le\delta\le\delta’_0$ |
| $s=$ | $h-2h\frac{(\delta_0-\delta)^2}{\delta_0’^2}$ | $2h\frac{(\delta_0’-\delta)^2}{\delta_0^2}$ |
| $v=$ | $4h\omega\frac{(\delta_0-\delta)}{\delta_0^2}$ | $-4h\omega\frac{(\delta_0’-\delta)}{\delta_0’^2}$ |
| $\alpha=$ | $-4h\frac{\omega^2}{\delta_0’^2}$ | $4h\frac{\omega^2}{\delta_0^2}$ |
简谐运动(余弦加速度)
| 待求量 | 推程 | 回程 |
|---|---|---|
| 简谐运动 | $0\le\delta\le \frac{\delta_0}{2}$ | $0\le\delta\le \frac{\delta_0’}{2}$ |
| $s=$ | $\frac{h}{2}[1-cos(\frac{\pi\delta}{\delta_0})]$ | $\frac{h}{2}[1+cos(\frac{\pi\delta}{\delta_0})]$ |
| $v=$ | $\frac{\pi h\omega }{2\delta_0}sin(\frac{\pi \delta }{\delta_0})$ | $-\frac{\pi h\omega }{2\delta_0’}sin(\frac{\pi \delta }{\delta_0’})$ |
| $\alpha=$ | $\frac{\pi^2 h\omega^2 }{2\delta_0^2}sin(\frac{\pi \delta }{\delta_0})$ | $-\frac{\pi^2 h\omega^2 }{2\delta_0’^2}sin(\frac{\pi \delta }{\delta_0’})$ |
| 摆线运动 | $0\le\delta\le \frac{\delta_0}{2}$ | $0\le\delta\le \frac{\delta_0’}{2}$ |
| $s=$ | $h[\frac{\delta}{\delta_0}-\frac{1}{2\pi}sin(\frac{2\pi \delta}{\delta_0})]$ | $h-h[\frac{\delta}{\delta_0’}-\frac{1}{2\pi}sin(\frac{2\pi \delta}{\delta_0’})]$ |
| $v=$ | $\frac{h\omega}{\delta_0}[1-cos(\frac{2\pi \delta}{\delta_0})]$ | $-\frac{h\omega}{\delta_0’}[1-cos(\frac{2\pi \delta}{\delta_0’})]$ |
| $\alpha=$ | $\frac{2 \pi h \omega }{\delta_0^2}sin(\frac{2 \pi \delta}{\delta})$ | $-\frac{2 \pi h \omega }{\delta_0^2}sin(\frac{2 \pi \delta}{\delta})$ |
由以上知识可知,其运动过程如下所示:
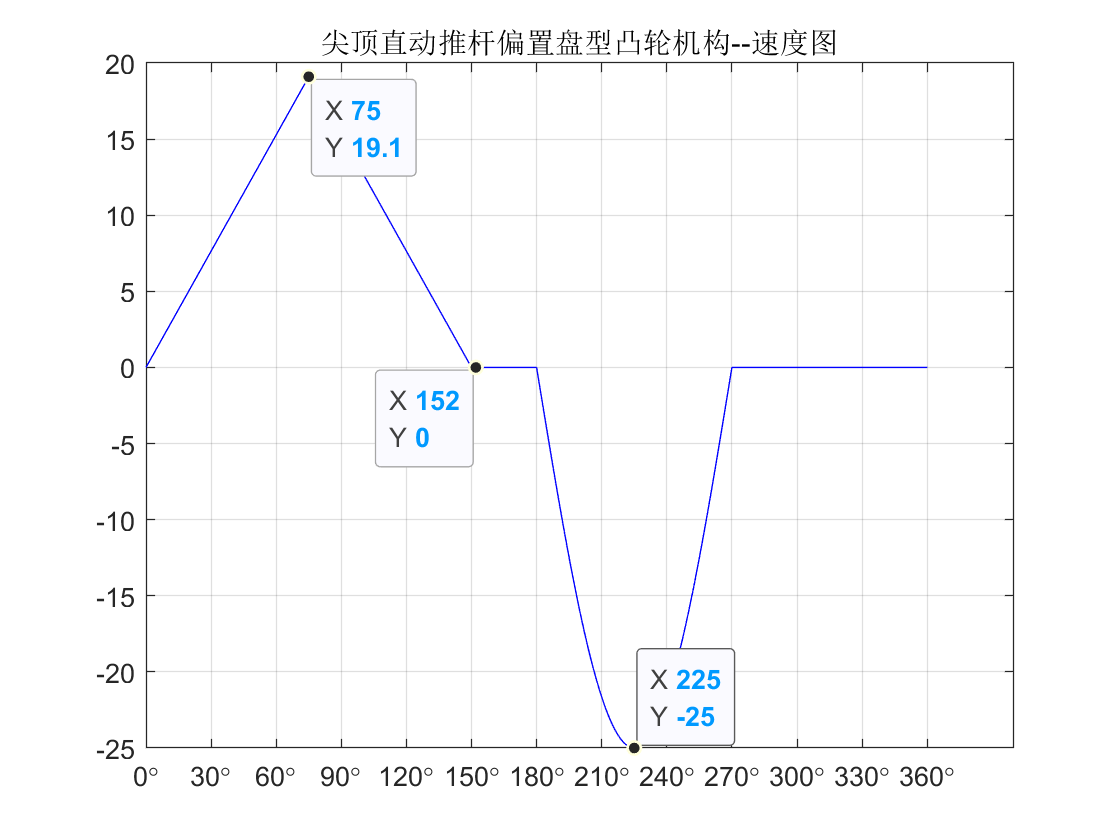
$v=\begin{cases} v1_1 = 4h\omega\frac{\delta}{\delta_0^2}& \delta\in(0,75^\circ) \\v1_2 = 4h\omega\frac{(\delta_0-\delta)}{\delta_0^2} & \delta \in(75^\circ,150^\circ)\\ v2 = 0 & \delta \in (150^\circ,180^\circ) \\v3=-\frac{\pi h\omega }{2\delta_0'}sin(\frac{\pi \delta }{\delta_0'}) & \delta\in(180^\circ,270^\circ) \\v4= 0 & \delta \in(270^\circ,360^\circ) \end{cases}$
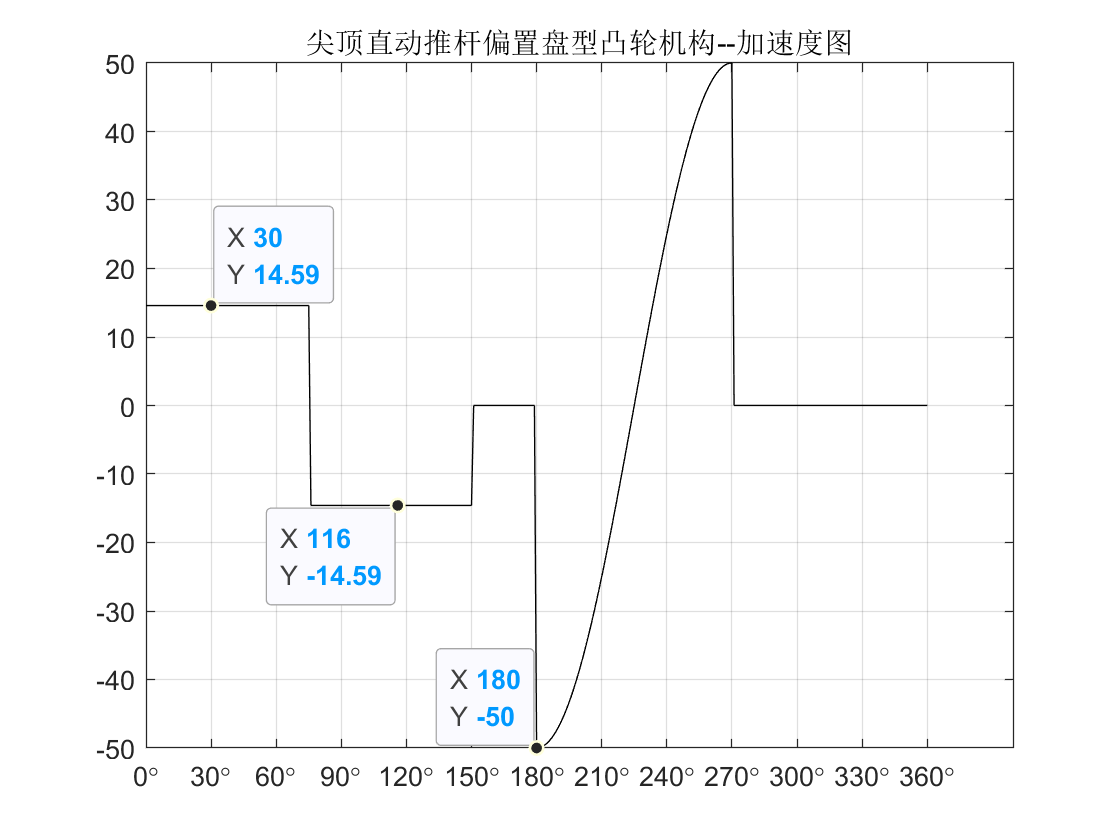
$\alpha=\begin{cases} a1_1 = 4h\frac{\omega^2}{\delta_0'^2}& \delta\in(0,75^\circ) \\a1_2 = -4h\frac{\omega^2} {\delta_0'^2} & \delta \in(75^\circ,150^\circ)\\ a2 = 0 & \delta \in (150^\circ,180^\circ) \\a3= -\frac{\pi^2 h\omega^2 }{2\delta_0'^2}sin(\frac{\pi \delta }{\delta_0'})& \delta\in(180^\circ,270^\circ) \\ a4= 0 & \delta \in(270^\circ,360^\circ) \end{cases}$
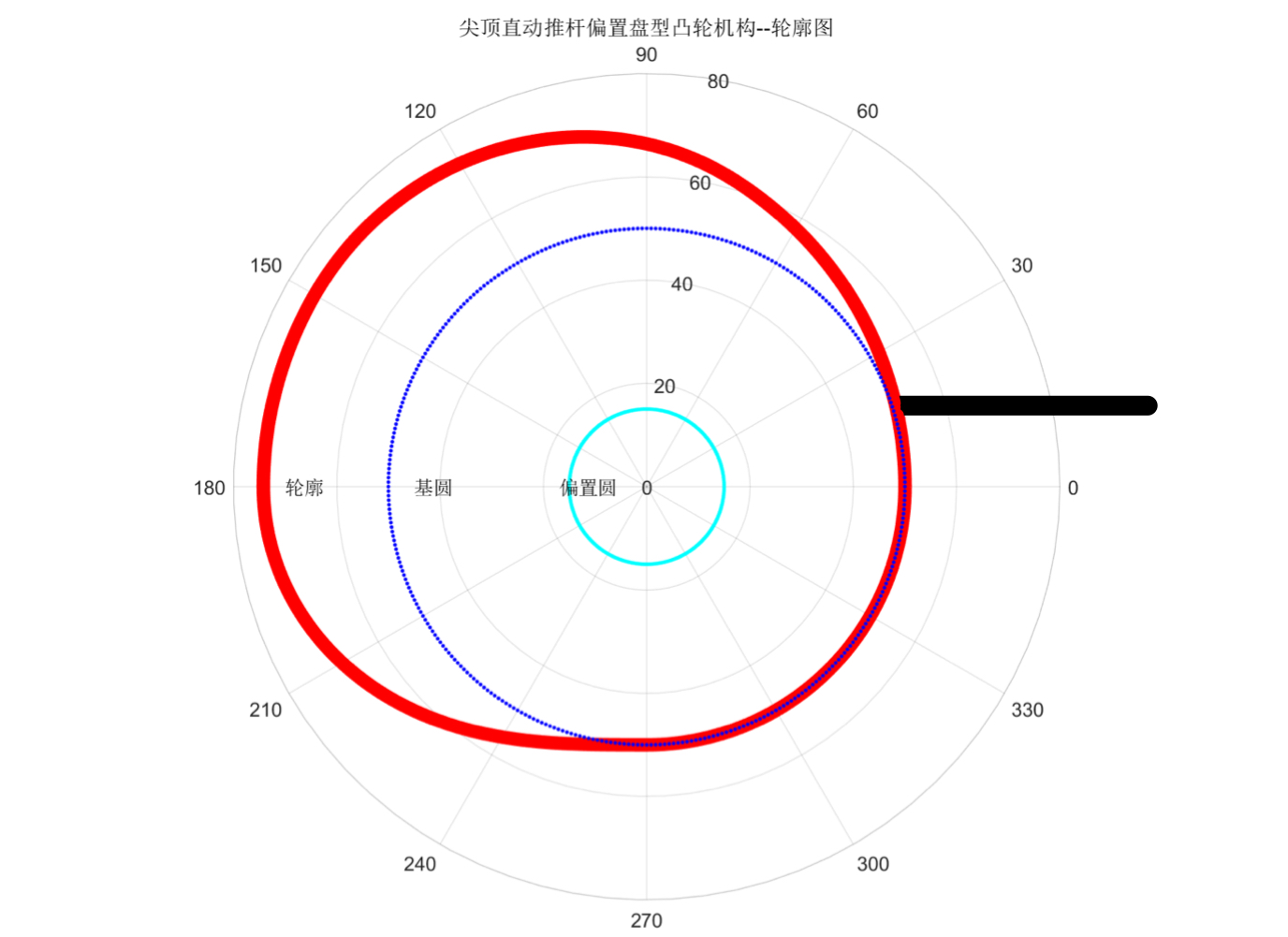
再得偏置直动尖顶推杆盘型凸轮机构理论轮廓线:
$\begin{cases} x=(s_0+s)\sin\delta + e\cos\delta \\y=(s_0+s)\cos\delta - e\sin\delta\end{cases}$
其中$s_0=\sqrt{r_0^2-e^2}$
采用解析法,得到如下图所示盘型凸轮机构轮廓图:
部分程序示例
1 | clear |